Recent learning-based path planners use neural networks to process visual map representations and
approximate heuristics for classical search algorithms, yielding near-optimal paths with reduced search
effort. However, these methods are tied to the shortest-path objective implicit in their supervision,
which limits their flexibility to accommodate alternative criteria.
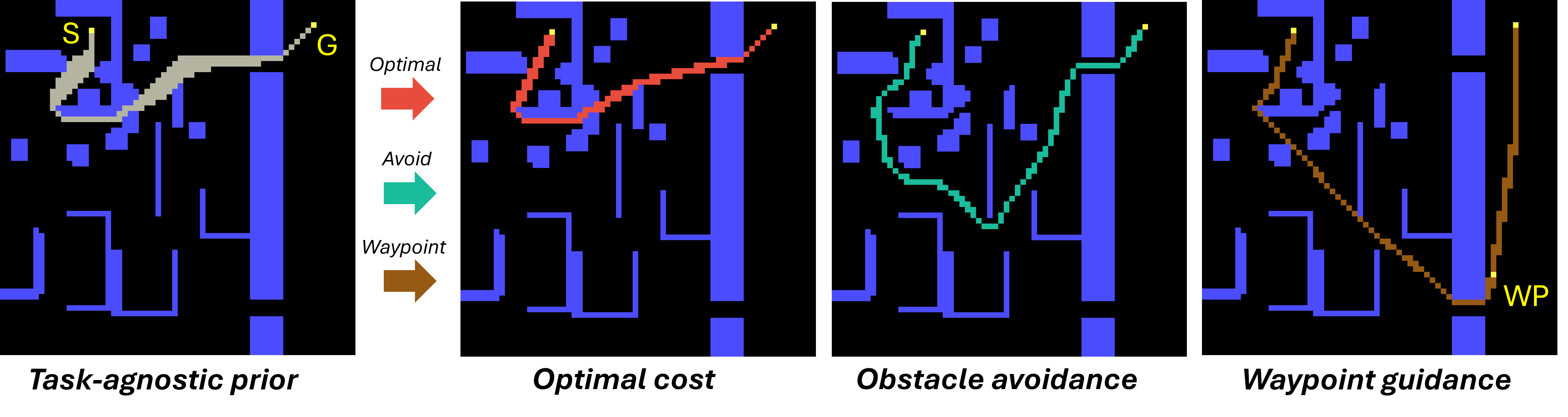
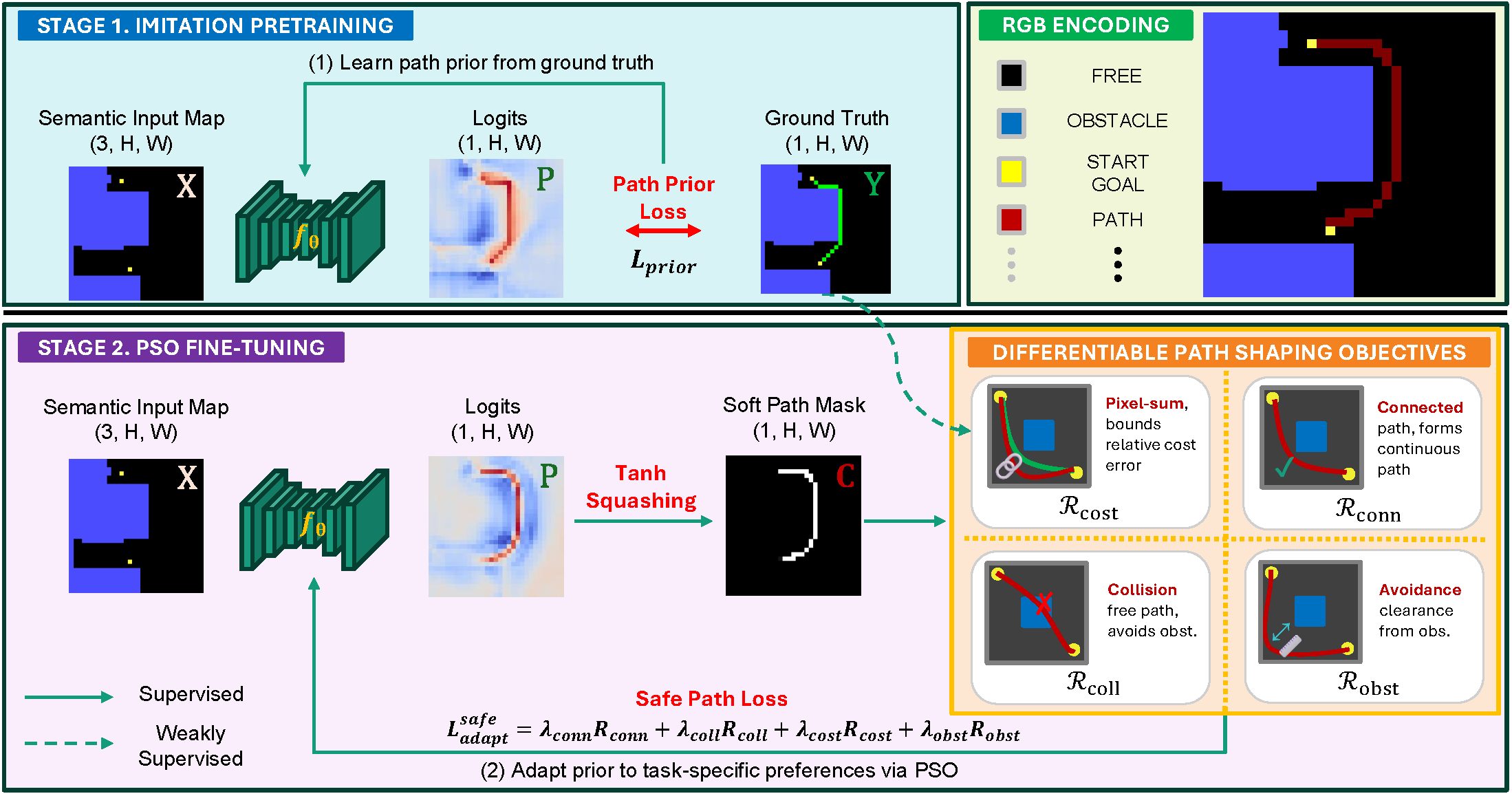
FlexPath introduces a two-stage framework that decouples feasibility from preference. In Stage 1,
imitation learning acquires a task-independent spatial prior over feasible paths from visual map inputs.
In Stage 2, differentiable Path Shape Objectives (PSOs) adapt this prior toward task-specific criteria
without relearning path structure. A single pretrained model can be adapted to multiple objectives.
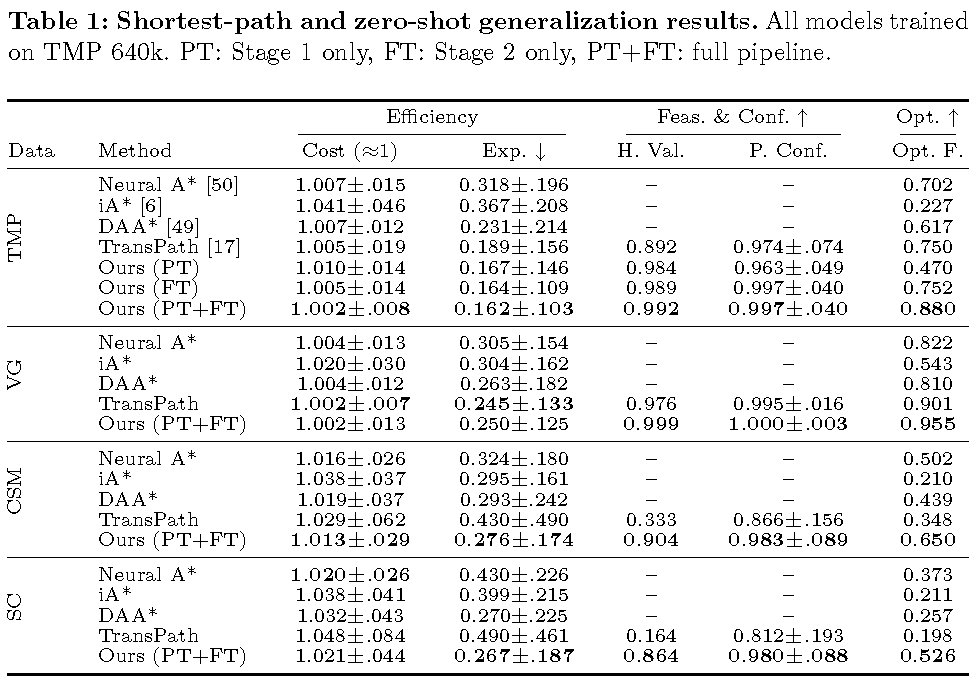
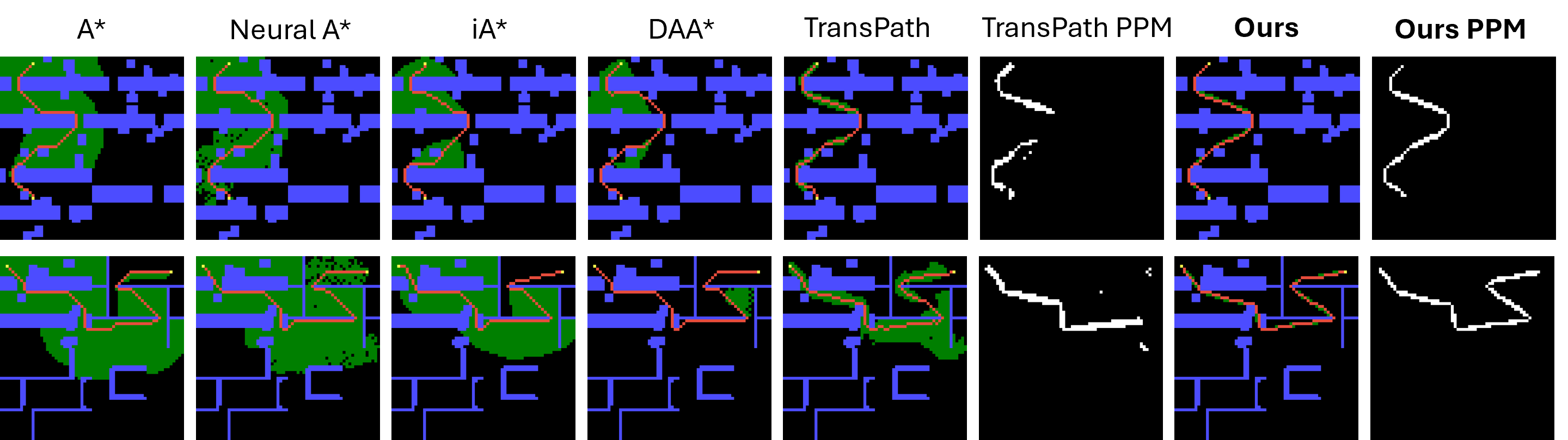
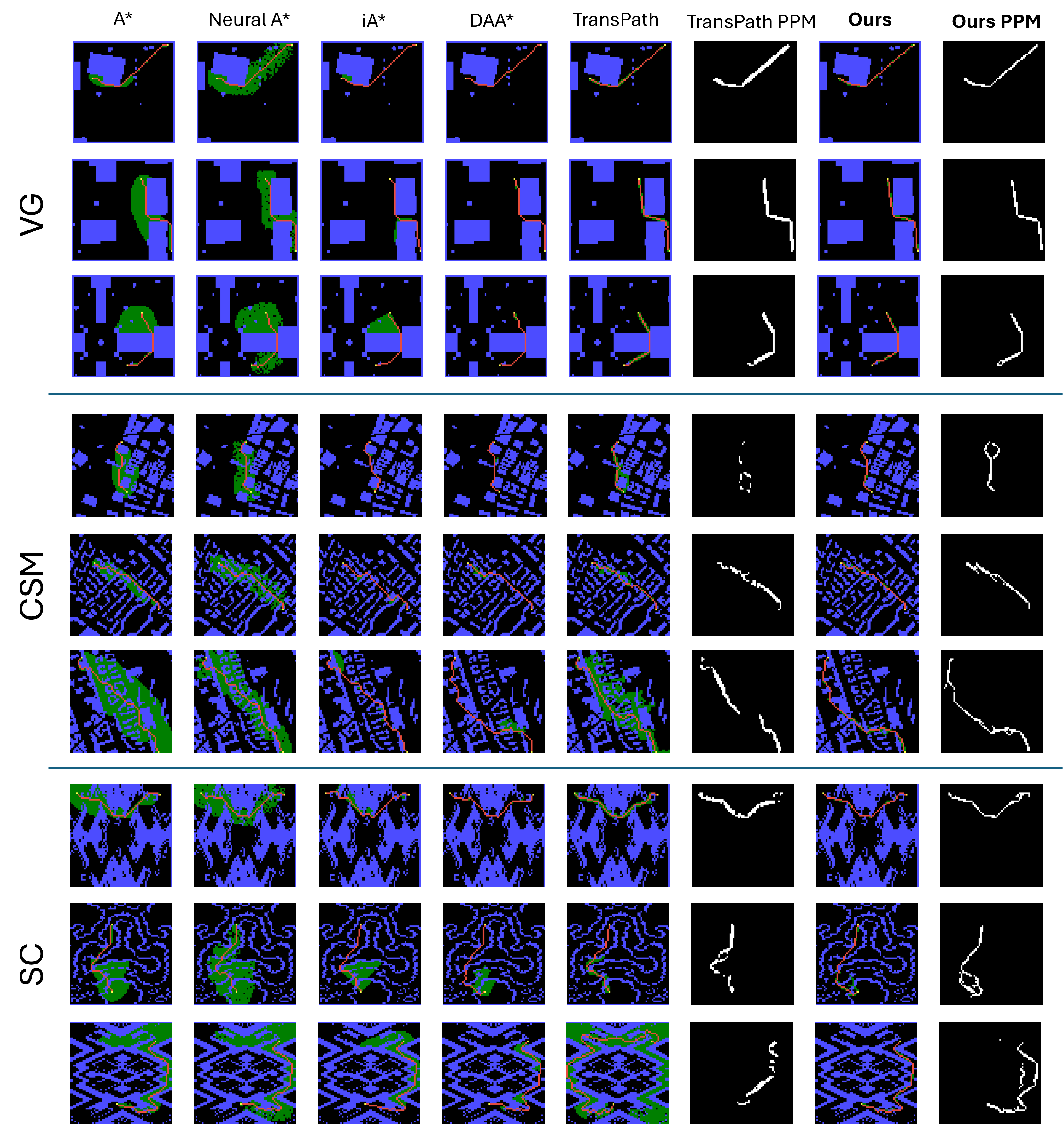
For shortest-path planning, FlexPath reduces search effort on TMP by 14.3% compared to
TransPath while also finding lower-cost paths and demonstrating strong zero-shot generalization across
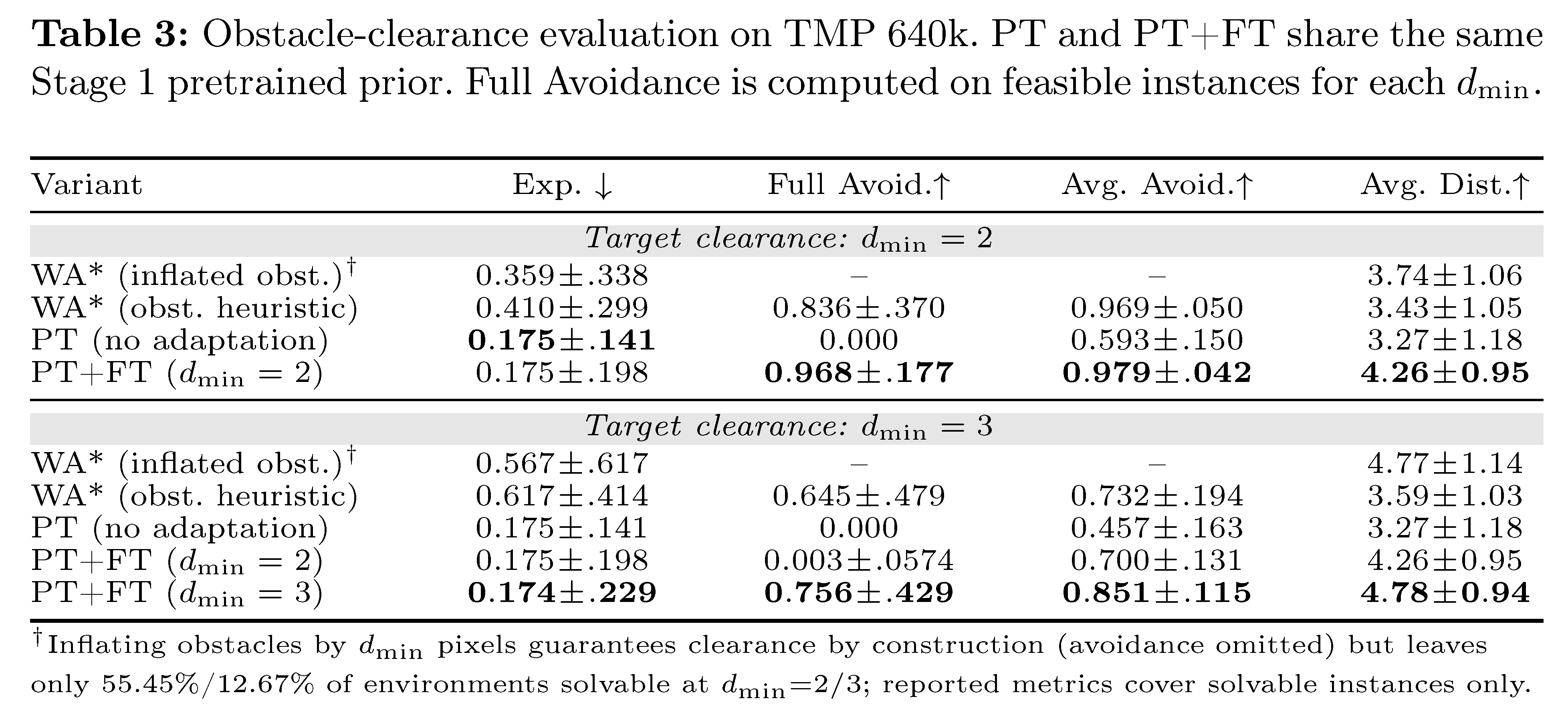
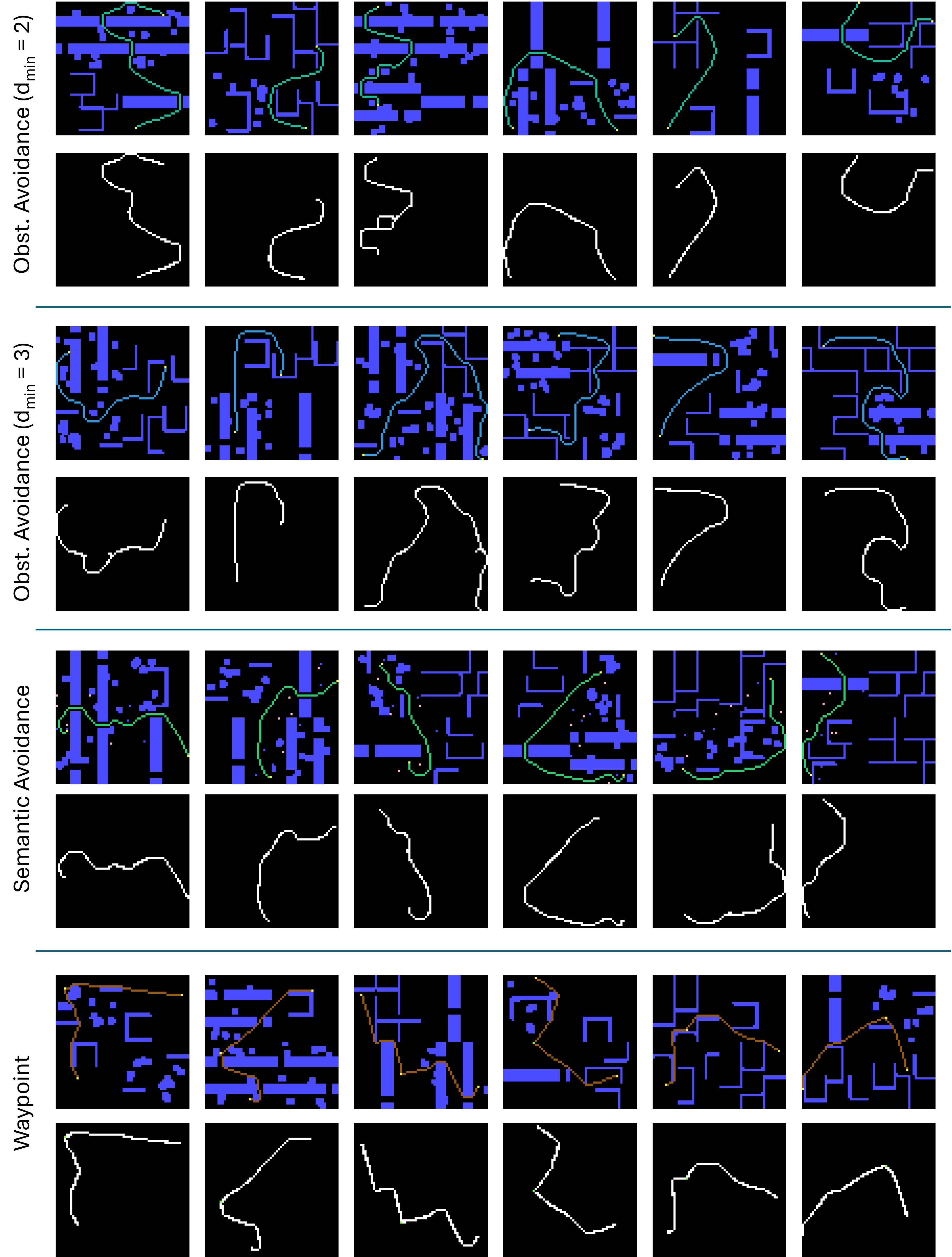
three unseen domains. For obstacle clearance (dmin = 2), it achieves 96.8%
full obstacle avoidance while maintaining low search cost. The framework extends to semantic-aware
avoidance and waypoint guidance via objective-level adaptation.